1. 核心技术
与GNSS/INS松组合、紧组合相比,深组合是GNSS和INS在信号层面的深度融合,更大程度地发挥惯性对GNSS的辅助作用,有助于改善GNSS的高动态特性及其在动态条件下的灵敏度、精度和抗干扰抗欺骗性能。因此,GNSS/惯性深度融合技术是解决卫星导航系统信号脆弱性的有效手段,适用于城市峡谷、遮挡、干扰、导弹制导等复杂应用场景。
从2010年开始经过几年的技术积累沉淀,建立了一套完整的INS辅助GNSS跟踪环的误差传递模型,是深组合研究中合理选择惯性器件、设计跟踪环参数、分析环路性能的有效工具(国际首次);同时也研制了一体化的GNSS/INS标量深组合硬件原理样机(国内领先)。结合GNSS/INS深组合优势及科研项目支持情况,本单位分别研究了动态条件下GNSS载波相位高精度测量、GNSS信号断续衰落条件下定位性能、超高动态条件下导航性能。
2. 产品介绍
本单位具有基于C#的GNSS/INS深组合系统软件,和软硬件一体化的GNSS/INS深组合原理样机。GNSS接收机子系统和INS子系统共用一套FPGA+DSP硬件平台,软件算法在DSP处理器完成,如图1。采用GNSS/INS硬件模拟器和车载平台对原型样机进行了测试评估和性能优化,基于车载平台测试表明深组合系统性能明显优于松组合、紧组合和普通接收机性能。原理样机于2013年在中国卫星导航年会上进行了展示,其相关成果在ION和CSNC会议上进行了报告,获得了CSNC优秀论文奖,且在SCI期刊上发表论文。
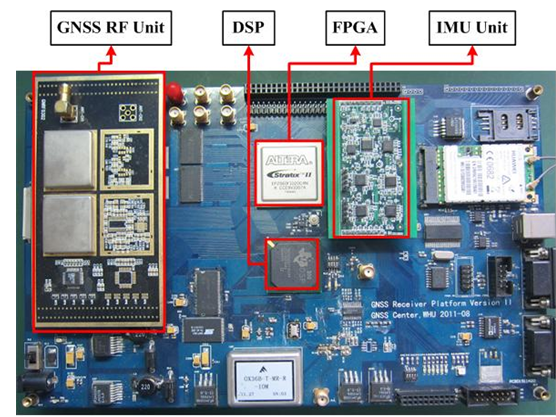
图1 深组合原型系统
3. 主要用途
1)动态精密测量:将GNSS/惯性深组合技术用于改善动态条件下接收机的载波相位测量精度,典型应用场景包括地震、山体滑坡等灾害测量。2.5g动态条件下普通锁相环和INS辅助锁相环跟踪误差的对比结果表明:辅助后动态跟踪误差明显减小,且可以通过压缩环路带宽降低环路噪声。
2)复杂环境导航:大众车辆在城市高楼、天桥环境下行驶时,导致GNSS信号频繁的断续、衰落,伪距精度和连续性无法保证。深组合技术采用INS估计的先验动态信息辅助GNSS信号接收,可以估计GNSS信号短时间中断情况下的伪距和多普勒,解决了频繁衰落的GNSS信号的高精度跟踪问题。
3)超高动态应用:即使是专用高动态GNSS接收机能够承受的载体加加速度很难超过30g/s,50g/s的高动态条件下GNSS接收机无法正常工作。然而,GNSS/INS深组合系统在最大加速度50g、最大加加速度50g/s的超高动态条件下,可以保证GNSS接收机正常跟踪卫星信号,且最大位置误差小于6m,最大速度误差小于1m/s。
4. 联系方式
联系人:张提升
邮箱:zts@whu.edu.cn
电话:18907137686
地址:武汉大学信息学部教学实验大楼12楼1202室
5. 附件_详细介绍
 GNSS-INS深组合详细介绍.pdf (963.87 KB)
GNSS-INS深组合详细介绍.pdf (963.87 KB)